Digital PID controller
This scenario will allow you to control the state of the selected system.
A PID controller is an instrument used in industrial control applications to regulate temperature, flow, pressure, speed, and other process variables. PID (proportional integral derivative) controllers use a control loop feedback mechanism to control process variables and are the most accurate and stable controllers.
The purpose of a PID controller is to force feedback to match a setpoint, such as a thermostat that forces the heating and cooling unit to turn on or off based on a set temperature.
Installation
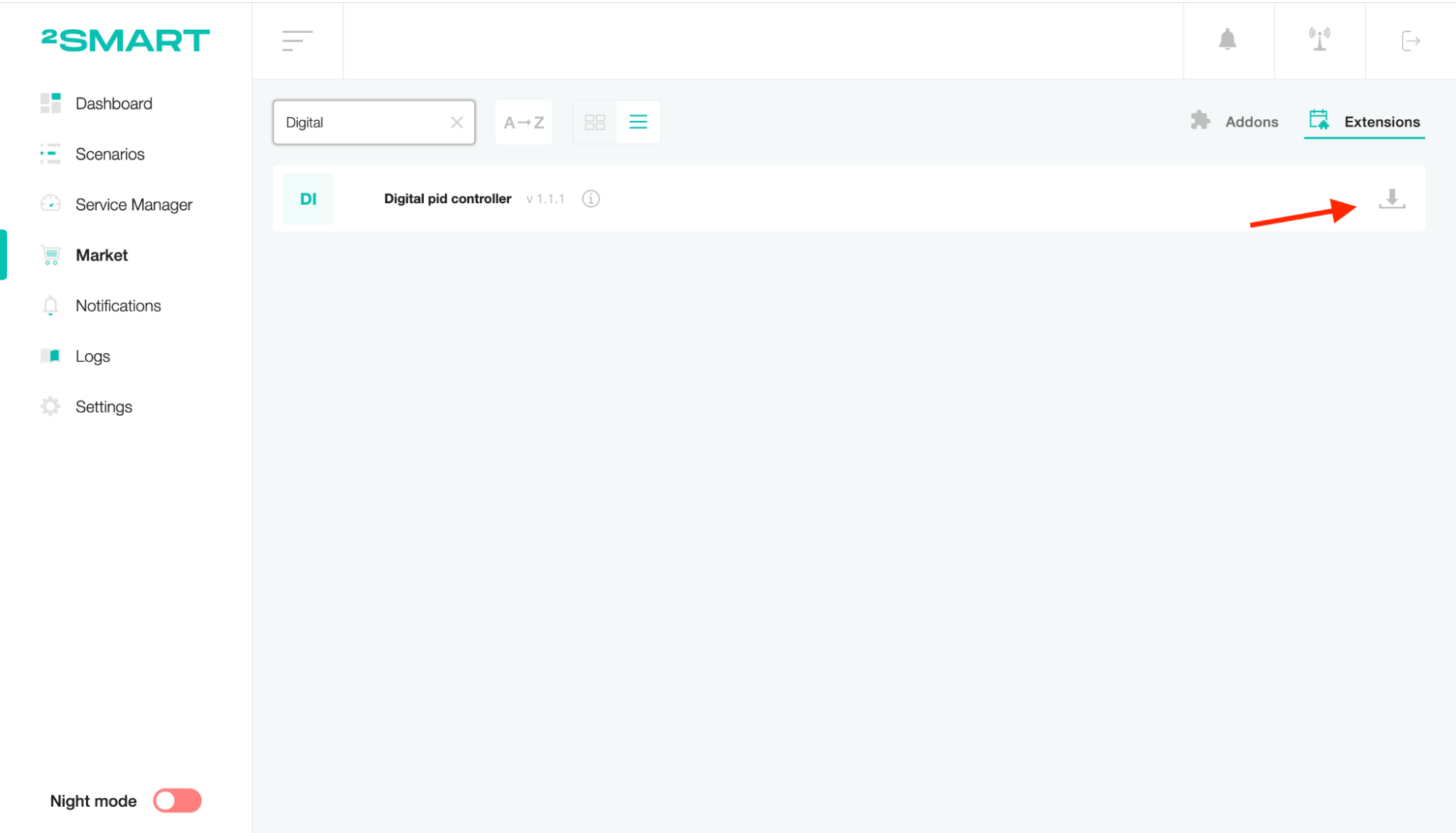
On the Market page, open the Extensions tab and click on the download icon near the selected item.
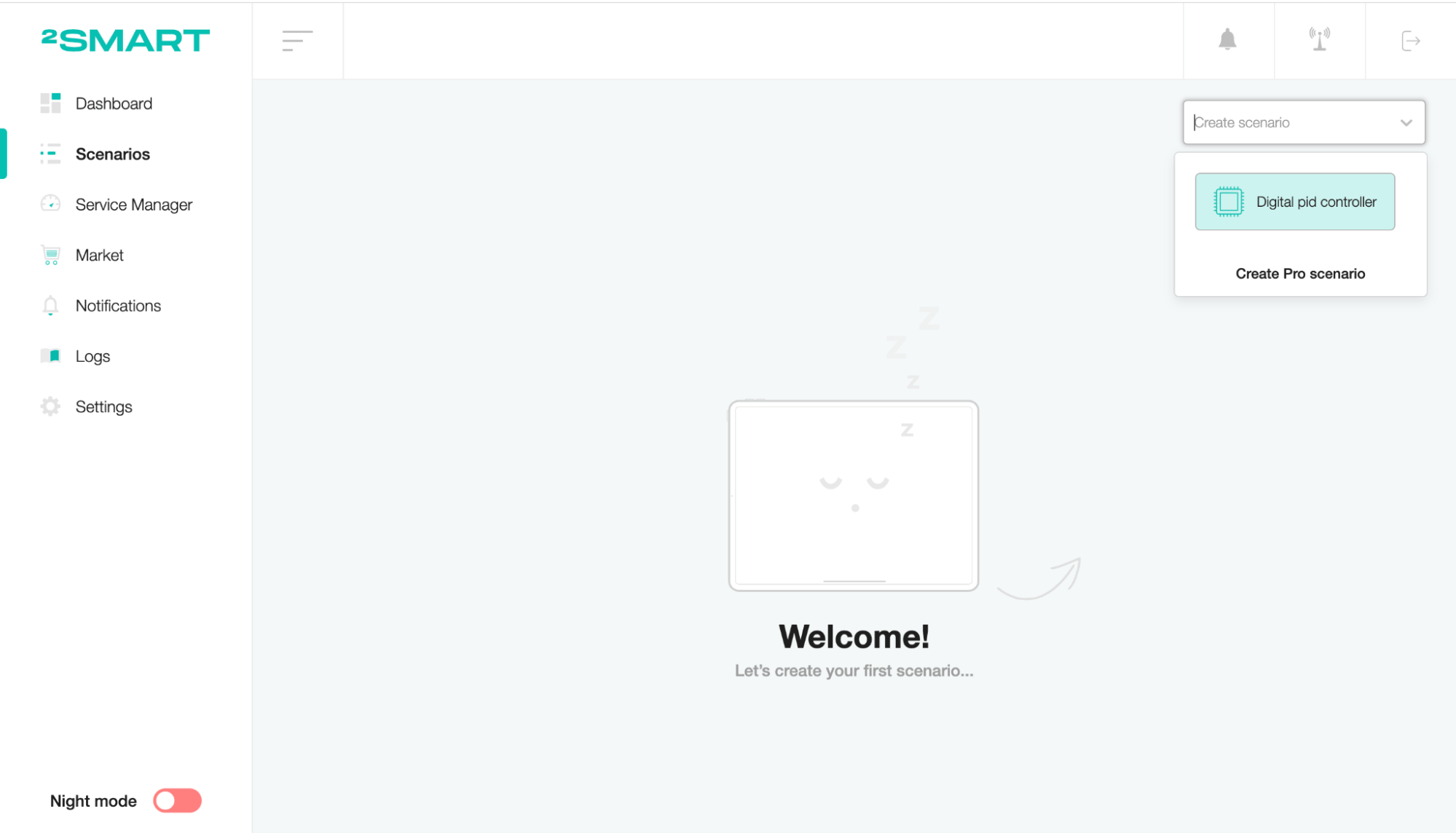
Go to the Scenarios page, click the “Create scenario” list and select the scenario you need.
Setup
A digital PID controller reads the sensor signal, generally from a thermocouple or RTD, and connects the measurement to engineering units, such as degrees Fahrenheit or Celsius, that are then displayed in a digital format.
To edit the scenario name, click on the title, enter a new value and save.
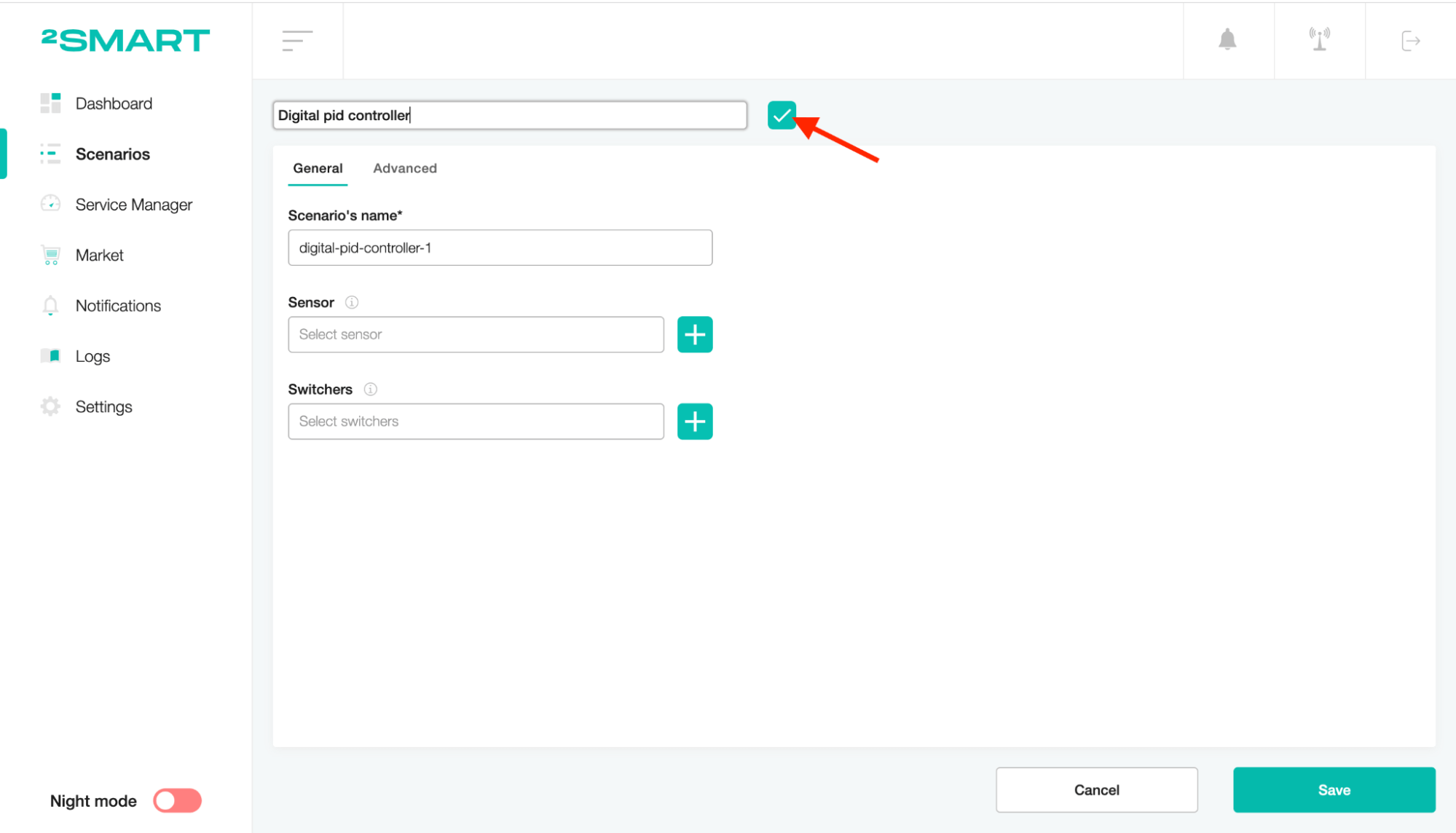
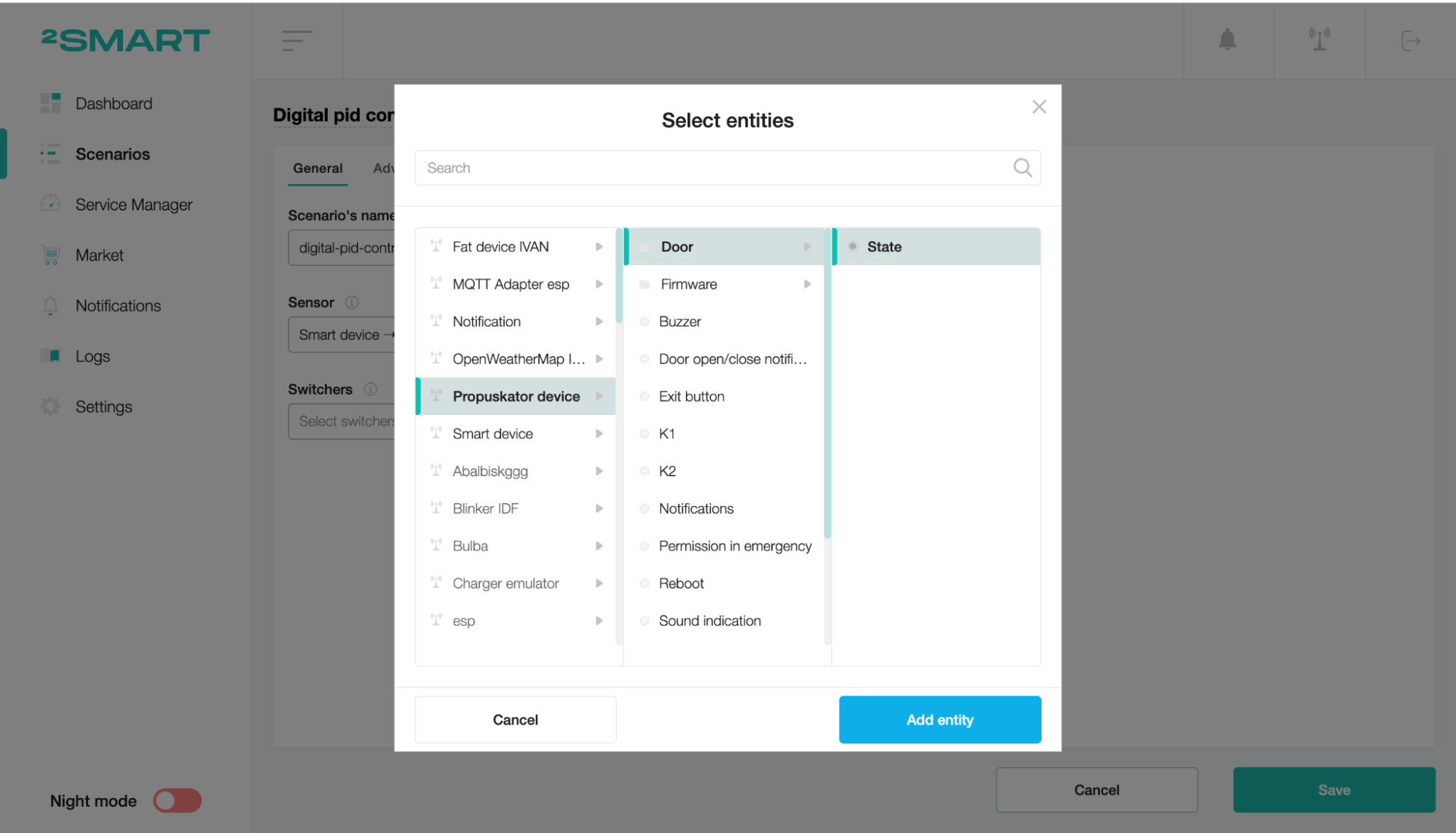
Choose the device sensor of the current system state.
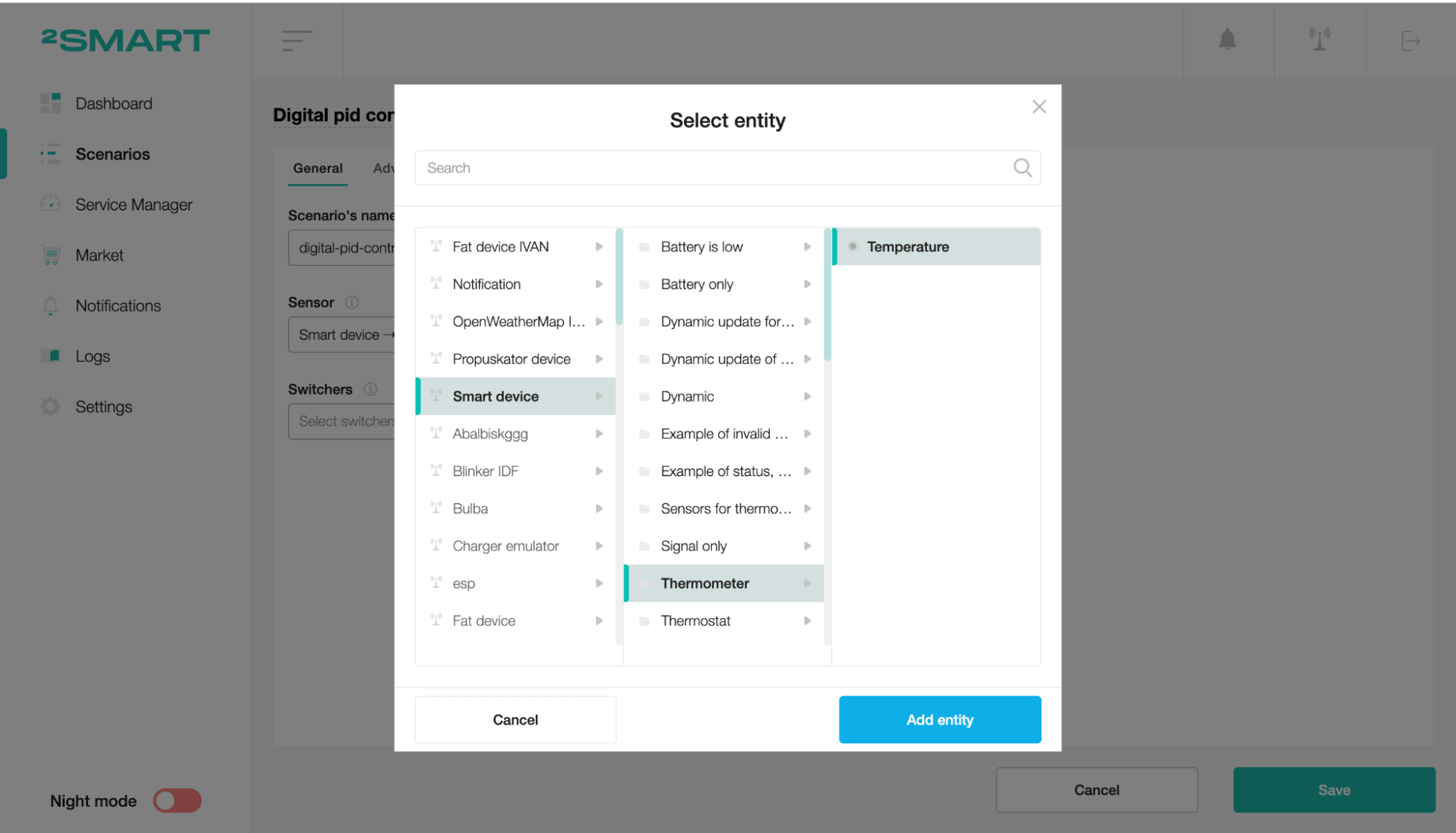
Choose device sensors for monitoring system status.
The working principle of a PID controller is that the proportional, integral, and derivative terms must be individually adjusted or "tuned." A correction factor is calculated and applied to the input based on the difference between these values. For example, the heat will be increased if an oven is cooler than required. Here are the three steps:
Proportional tuning involves correcting a target proportional to the difference. Thus, the target value is never achieved because as the difference approaches zero, so too does the applied correction.
Integral tuning attempts to remedy this by effectively cumulating the error result from the "P" action to increase the correction factor. For example, if the oven remained below temperature, "I" would act to increase the head delivered. However, rather than stop heating when the target is reached, "I" attempts to drive the cumulative error to zero, resulting in an overshoot.
Derivative tuning attempts to minimize this overshoot by slowing the correction factor applied as the target is approached.
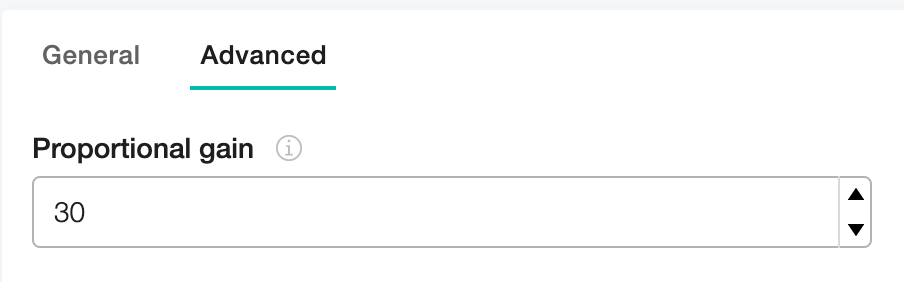
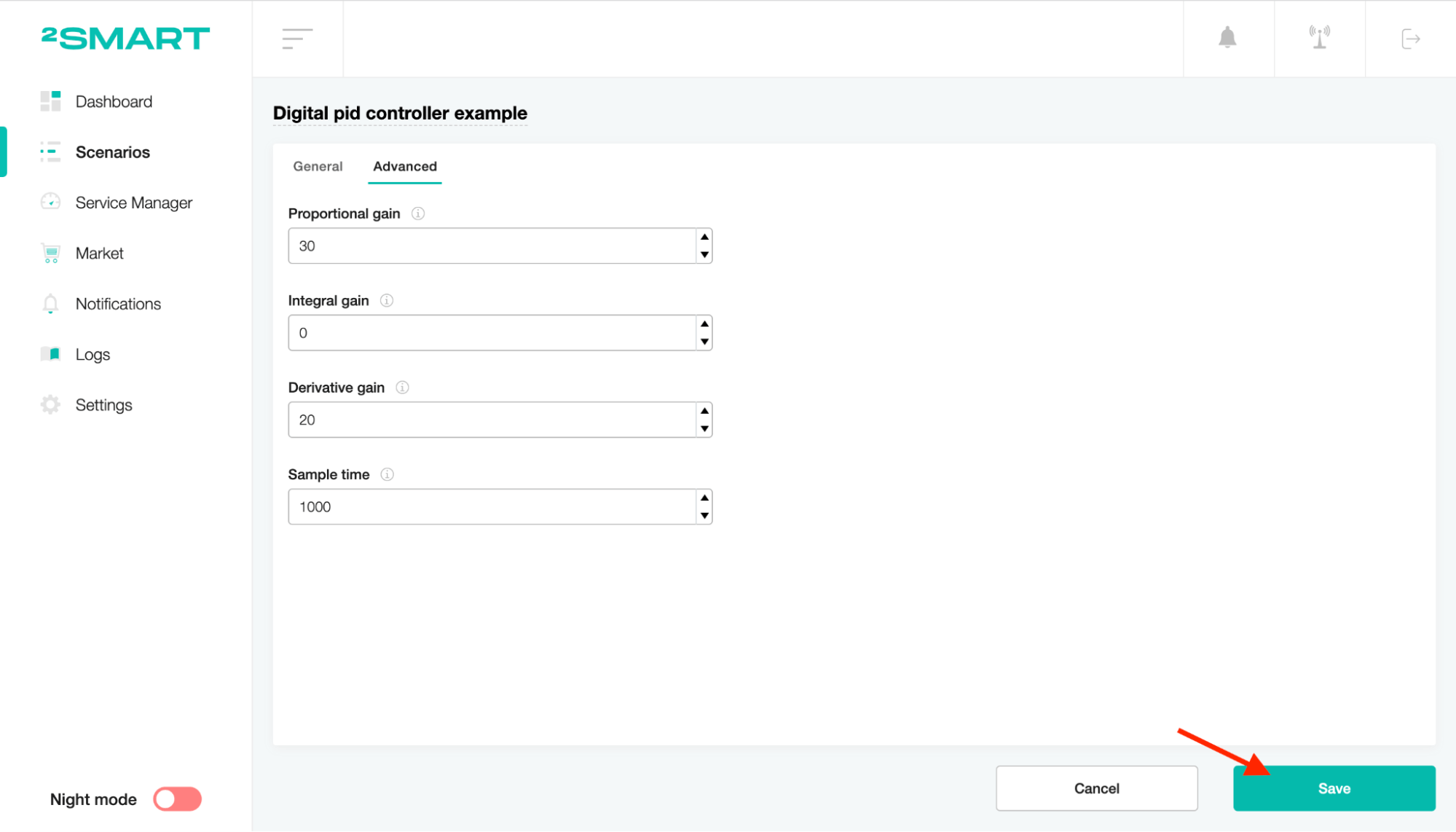
For the correct operation of the scenario, it is necessary to select and calibrate these coefficients. On the Advanced tab, set the correction for the current deviation (example: 5).
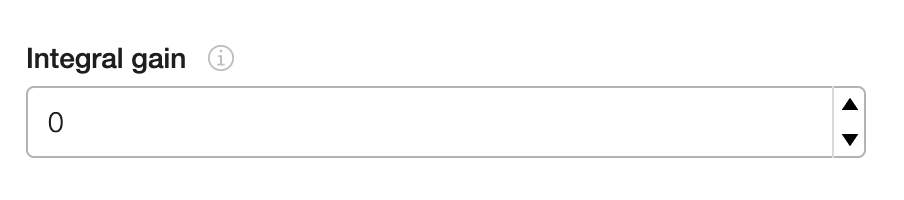
Set the correction for the previous abnormality (example: 5).
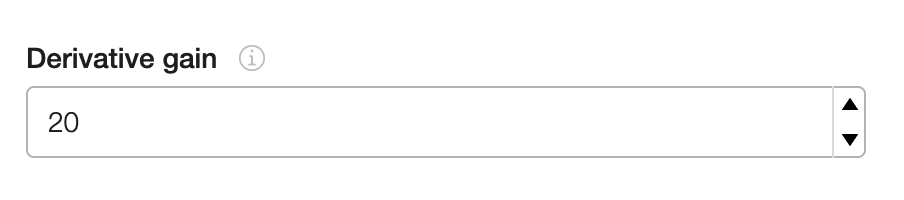
Set the predicted variance correction (example: 5).
Set the minimum interval (in ms) between adjustments (example: 50). To save the scenario, click the “Save” button.
To start the scenario, turn on the toggle of the status.
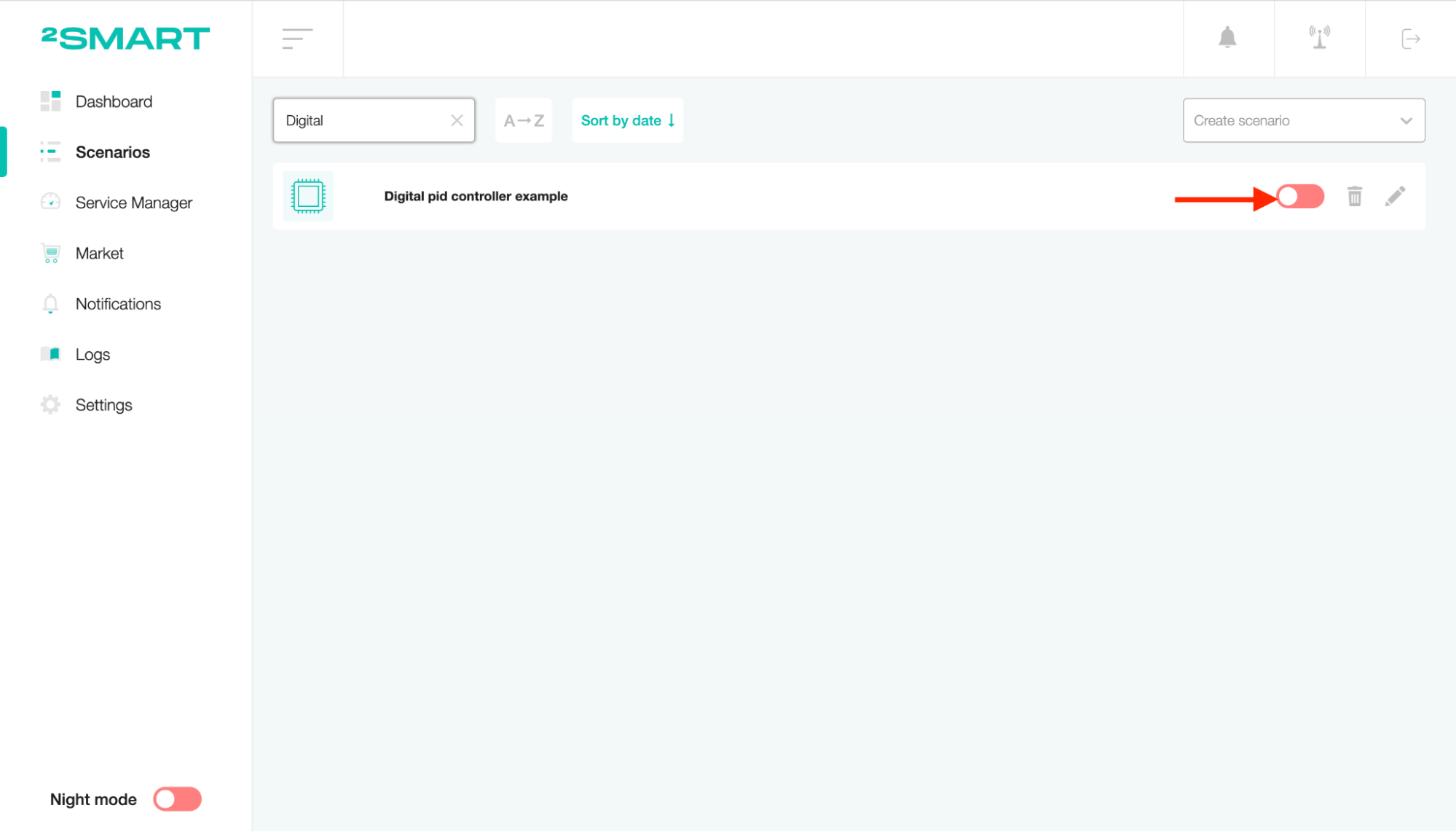
Turn on the scenario, and the threshold will appear in the scenario settings. Click on it to see the details.
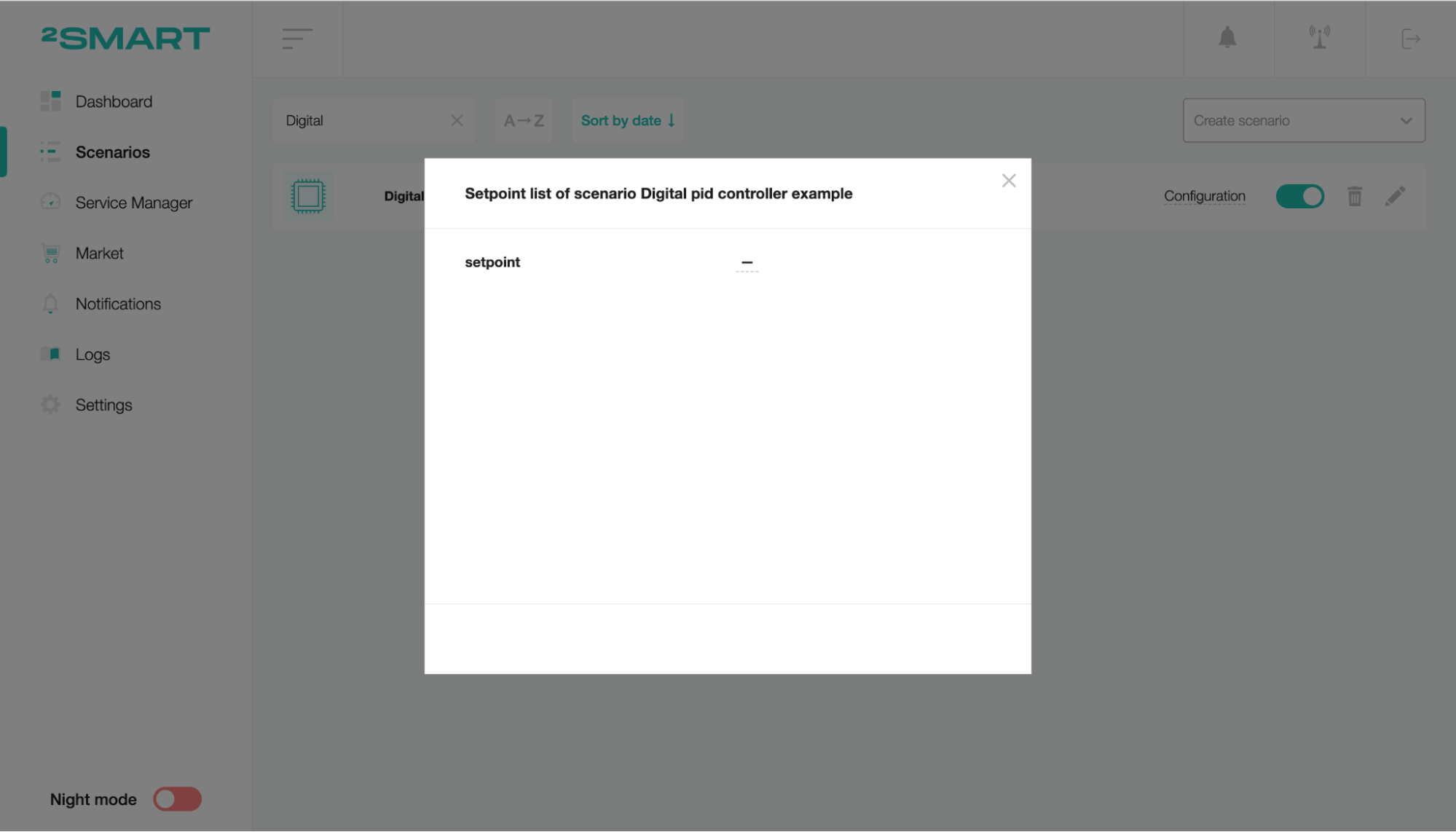
As an example, enter the setpoint temperature to support the device's condition.
A digital PID controller is the simplest form of the temperature control device. The output from the device is either on or off, with no intermediate state. A digital controller will switch the output only when the temperature crosses the setpoint. One special type of on-off control is a limit controller. This controller uses a latching relay, which must be manually reset, and is used to shut down a process when a specific temperature is reached.